|
|
||
|---|---|---|
| .vscode | ||
| docs | ||
| include | ||
| lib | ||
| src | ||
| test | ||
| .gitignore | ||
| README.md | ||
| packet.md | ||
| platformio.ini | ||
README.md
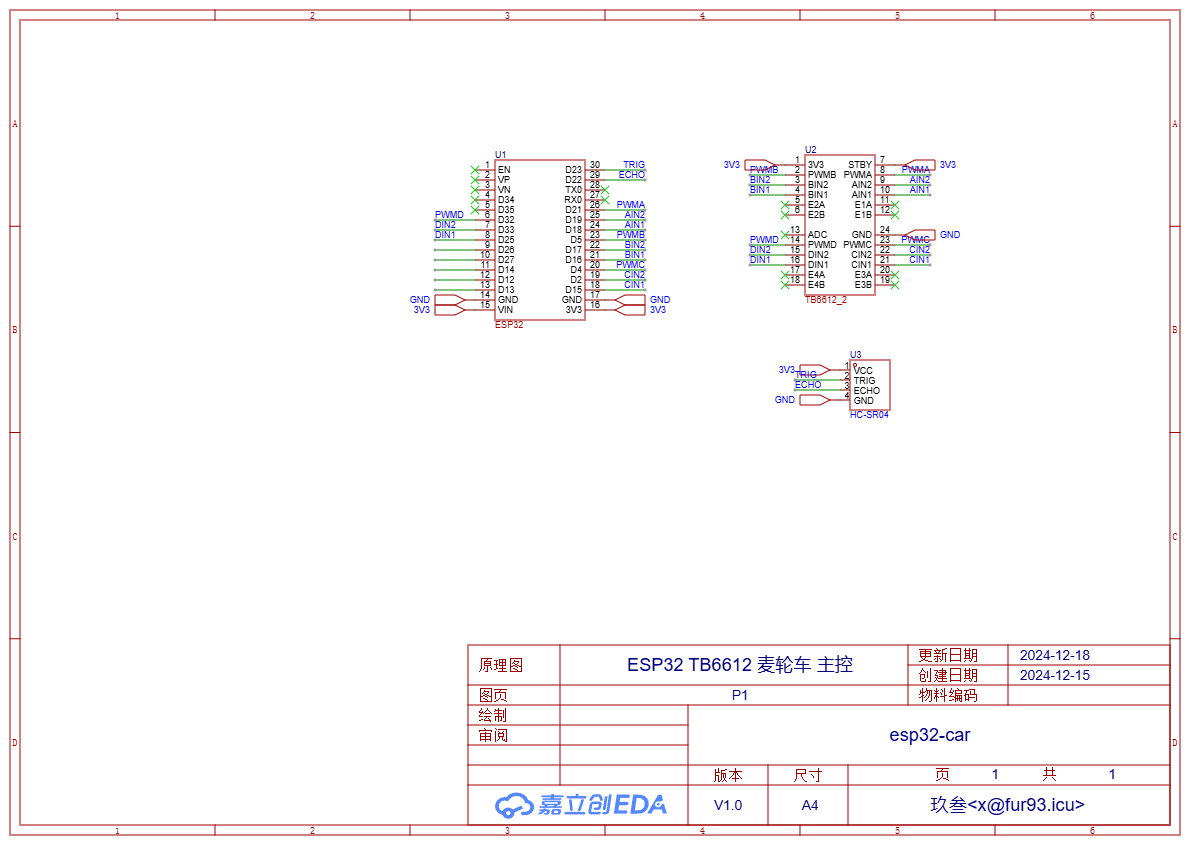
ESP32 TB6612 麦轮车
特性
- ESP32 主控
- 四路 TB6612 电机驱动
- 麦轮车
- BLE 串口通信
- 循迹功能
- 手动控制
原理图
使用
VSCode 安装 PlatformIO
下载项目
git clone https://github.com/colour93/esp32-car.git
打开项目并修改初始化设置
找到 src/consts.example.h 文件,复制一份并命名为 src/consts.h,根据实际情况,修改其中的内容。
上传
使用 PlatformIO 上传项目。